8月8日,2025世界機器人大會在北京經濟技術開發區開幕。其間,一目科技創始人兼CEO李智強博士參與人工智能大模型賦能機器人與具身智能產業新范式論壇,發表《觸覺增強的世界模型》主題演講并發布一目視觸覺傳感器。
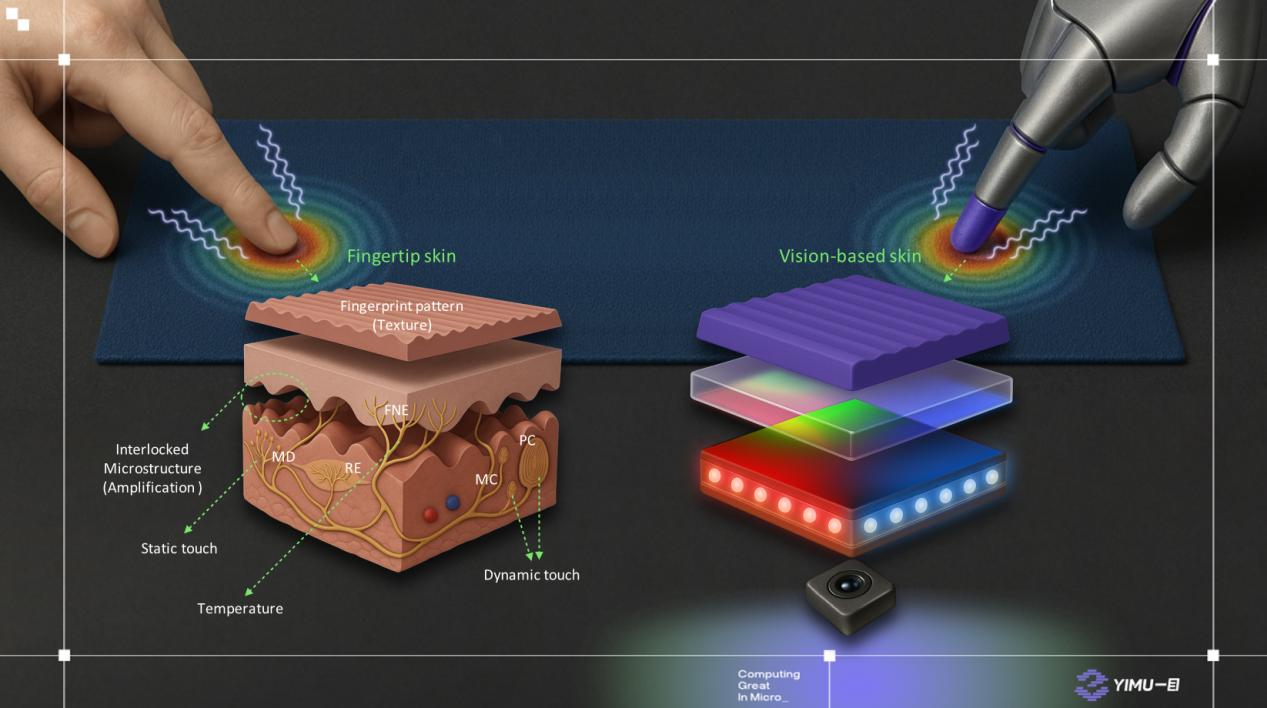
據了解,安裝該傳感器相當于給機器人裝上了“能看見觸感”的眼睛——它用攝像頭拍下彈性材料接觸物體時的細微形變,再把這些變化轉化成高清的“觸覺照片”。比起傳統只能感知單一壓力傳感器,它能同時“感受”物體的軟硬、紋理甚至滑動趨勢。這種高保真的觸覺信息,能幫機器人更精準地“理解”物體特性,像人類一樣完成精細操作。
AI大模型筑基具身智能:需補上“觸覺感知”課
“對比文本、視覺類大模型,具身智能在物理世界感知能力上仍有明顯不足——溫度、材質、光滑度等觸覺數據的缺失,制約著其技術瓶頸突破。”李智強博士在采訪中直指核心問題。
他認為,AI大模型要為具身智能筑基,需先解決兩大難題:一是數據采集,需通過高保真觸覺感知技術,還原人類指尖的多維力學感知能力,收集物理世界的“觸覺語言”;二是數據量不足,“大模型需要海量數據才能收斂泛化,我們提出‘以真實觸覺信號錨定仿真系統,通過仿真計算生成超真實任務變體數據’的閉環路徑,為神經世界模型提供數據‘養料’。”
多傳感器融合:從“看”到“觸”的操作閉環
針對一目科技自研的多傳感器融合系統(融合視覺、觸覺、力覺等模態),李智強解釋其核心價值:“人類操作時,視覺主導環境感知,而精細抓握的核心在于觸覺與力覺的協同——尤其在物體接觸瞬間,視覺對微觀交互的感知能力顯著受限,這正是多模態融合技術的核心價值所在。”
該系統的優勢體現在三方面:一是通用接口設計,可與VLA大模型及觸覺模型集成,構建VTLA大模型體系,快速接入前沿算法;二是傳感器芯片化創新,通過微型化與低功耗技術提升觸覺信號的保真度;三是材料學突破,團隊研發的“仿生皮膚”在耐久性與感知特性上趨近人類指尖,支撐長時間、高精度操作。
通用機器人落地難點:數據量與泛化性需“分而治之”
對于通用機器人在開放場景中實現閉環迭代的最大難點,李智強認為數據量缺失和場景泛化性不足是兩大核心挑戰。
“真實世界數據采集效率低,純靠采樣是線性過程,難以滿足大模型需求。”一目科技正通過與行業頭部企業合作,將觸覺仿真能力接入其世界大模型,“通過觸覺仿真能力與世界模型的融合,構建‘真實錨定虛擬’的數據閉環,實現物理交互數據的指數級擴增。”
針對場景泛化性,他提出“分而治之”策略:“80%的通用任務(如抓取、放置)由基礎模型提供標準化力控接口,實現語義級動作規劃;剩余20%高精度場景(如醫療儀器操作),則通過‘技能包’形式提供專業參數配置,讓機器人能像下載APP一樣‘學會’新技能。”
產業新形態:從“儀器智能”時代到“具身智能的操作即服務”時代
談及AI大模型與具身智能的融合,李智強指出其將引發產業級變革:“正如互聯網重構所有行業,具身智能將推動多領域‘重做一遍’——通過物理世界與數字世界的深度耦合,重塑生產流程與服務范式。”
李智強進一步強調MaaS的顛覆性價值:“將機器人的精細化操作能力(如力控抓取、精密插拔)封裝為標準化的物理API接口,通用任務調用基礎模型接口,專業場景則通過參數配置實現技能定制,使物理操作能力成為即取即用的‘新基建’。”
展望未來,李智強認為具身智能的核心突破將集中在“物理世界與數字世界的深度連接”:“傳統數字化已在推進,具身智能將進一步擴張維度,讓萬事萬物的物理屬性都能被數字模型捕捉”。
“從過去十年類人的‘嗅覺、味覺’研究,到未來聚焦的觸覺技術,我們始終在復刻人類感知能力,讓AI智能體更懂物理世界——這是感知驅動的AI計算終極目標。”李智強說。
轉自:中國網
【版權及免責聲明】凡本網所屬版權作品,轉載時須獲得授權并注明來源“中國產業經濟信息網”,違者本網將保留追究其相關法律責任的權力。凡轉載文章及企業宣傳資訊,僅代表作者個人觀點,不代表本網觀點和立場。版權事宜請聯系:010-65363056。
延伸閱讀



