過去兩年,智能駕駛行業被熱詞推著一路狂奔:無圖、端到端、VLA、世界模型輪番登場,城區 NOA 滲透率一路突破 15%,表面一派繁榮。
可剝開層層包裝,行業正陷入一場尷尬的停滯:功能裝車越來越快,用戶信心卻跟不上;數據采集越來越多,系統表現卻遲遲不見本質提升。復雜路口猶豫、突發場景生硬、長尾問題無解,根源只有一個:整個行業還在用補丁式工程,試圖解決 AI 時代的系統性問題。
真正的瓶頸,從來不是某一個模塊不夠強,而是系統缺少一顆能統一思考、持續進化的 “大腦”。
傳統智駕架構把感知、決策、評估拆成各自為戰的孤島,數據閉環高度依賴人工介入,迭代周期動輒以天計算,再多數據也難以轉化為真實能力。這也是為什么不少廠商宣稱 “技術月月更新”,用戶卻幾乎感知不到差異:一兩個月的變化多是規則微調,而非模型能力的底層突破。
在 2026 英偉達 GTC 大會上,元戎啟行給出了破局方向:放棄局部優化,直接用40B 參數 VLA 基座模型重構系統。
這套方案不再是多個模型拼湊疊加,而是用統一基座同時承載感知、理解、推理、決策、自我評估,把過去分散割裂的能力,裝進一個可自我進化的完整系統。簡單說,就是給智駕 “換大腦”,讓車輛不再只是執行操作,更能理解場景、判斷風險、主動優化。
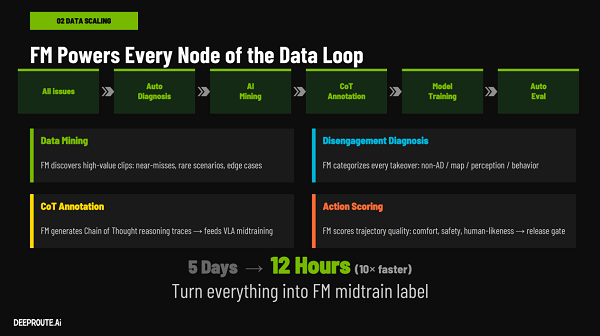
這場變革的核心價值,是迭代速度的數量級躍升。傳統數據閉環全流程耗時超過 5 天,而依托統一基座模型,元戎啟行把全鏈路壓縮到 12 小時,效率提升超 10 倍。
這意味著行業競爭邏輯徹底改寫:過去比誰補細節更快,未來比誰進化更強;過去靠工程堆料,未來靠模型驅動。
規模帶來的數據飛輪,與基座模型形成強力正循環:模型能力越強,數據挖掘效率越高;真實數據越多,模型進化速度越快。

當行業還在糾結 “數據夠不夠” 時,元戎啟行已經解決了更關鍵的問題:數據能不能用、能不能跑得快、能不能持續轉化為安全與體驗。
行業共識已經越來越清晰:下一階段智駕競爭,不再是傳感器與算法技巧的點對點比拼,而是模型規模、數據效率、迭代體系的綜合較量。
基座模型不是又一個營銷熱詞,而是一道真正的技術分水嶺。能跑通統一基座的玩家,將快速拉開與追趕者的代差;仍停留在模塊優化的選手,終將被速度徹底甩開。
從工程堆砌到 AI 原生,從補丁優化到底層重構,智能駕駛正在進入真正的 “大腦時代”。
元戎啟行的選擇,也為行業指明了方向:與其在舊體系里不停修補,不如用更底層的創新,來解決最根本的問題。
轉自:亞訊車網
【版權及免責聲明】凡本網所屬版權作品,轉載時須獲得授權并注明來源“中國產業經濟信息網”,違者本網將保留追究其相關法律責任的權力。凡轉載文章及企業宣傳資訊,僅代表作者個人觀點,不代表本網觀點和立場。版權事宜請聯系:010-65363056。
延伸閱讀



