2026 年 1 月 15 日,蘿博派對(Roboparty)在官方 GitHub 倉庫正式完整開源雙足人形機器人 “蘿博頭原型機(Roboto_Original)”,并同步啟動全球開發者共創計劃。

▲蘿博派對Github主頁
這款搭載擬人步態的 AMP 運控算法、跑步速度達 3m/s 的原型機,憑借全棧透明的技術開放模式,成為目前全球范圍內技術成熟度領先的全開源人形機器人。
不同于“只開源代碼或只開源結構圖”的碎片式開放,本次開源以“可復現、可二開、可驗證”為目標,覆蓋參考硬件、控制/訓練棧、工程化調試與驗證方法,以及長期維護的行業 Know-how 共創知識庫。
蘿博派對希望把“從 0 到跑”做成行業共享的具身 Infra 底座:把路徑標準化、把經驗工具化、把驗證流程公開化,推動行業把時間用在真正的場景與能力突破上。
全棧開源,直擊人形機器人開發痛點
人形機器人真正的門檻,往往不在某一個算法點,而在“從設計—裝配—標定—訓練—驗證—迭代”的系統工程。基于此,蘿博派對針對行業長期存在的三大核心痛點——閉源導致開發壁壘高、設計規范缺失、架構標準不統一——以“可復現、可二開、可驗證”為目標,正式發布雙足人形機器人“蘿博頭原型機”的全棧開源方案,并同步推出“動手學人形機器人問題清單”Know-how 共創文檔,推動行業經驗從“各自積累”走向“公開共享”。

▲安裝指南
在硬件層面,蘿博頭原型機公開 1.2m 身高、30kg 重量級本體的全套結構圖紙,覆蓋關節排布、線束收束方案以及金屬結構件選型標準等關鍵設計細節。同時,項目同步開放關節模組核心參數、選型指南與拆機報告,并提供國內優質供應商清單,配套完整 EBOM 物料清單與 SOP 組裝流程,從采購、裝配到復現路徑形成閉環,顯著降低硬件研發與復刻門檻。
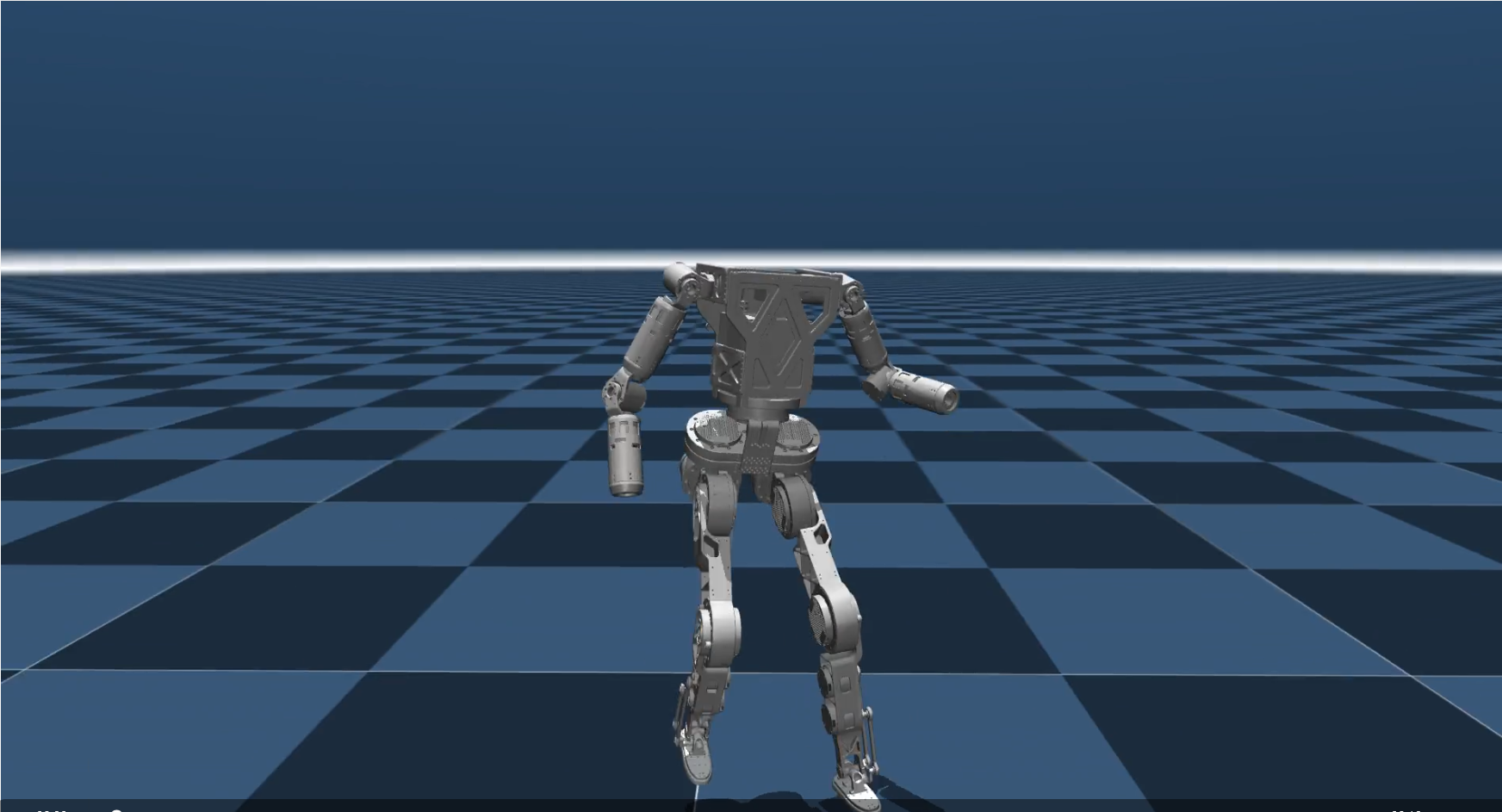
▲原型機在仿真環境中跑步/跳舞
在軟件與控制層面,項目開放底層控制全量代碼,涵蓋模仿運動、感知運動與導航運動三大核心模塊,并支持 SMPL-X 人體模型適配,使開發者能夠直接復用海量人體動捕數據,減少新任務開發中的微調成本,提升能力遷移效率,緩解傳統控制方案在泛化性與工程落地上的不足。同時,蘿博頭原型機同步開源擬人步態的 AMP 運控算法代碼,為步態自然度與運動穩定性的進一步迭代提供可直接復用的技術基礎。
在工程化落地層面,蘿博派對將研發過程中形成的 sim2real gap 彌補方案、樣機測試矩陣與調試經驗總結系統化公開,并同步沉淀關鍵避坑要點與流程規范,幫助開發者與合作團隊減少重復試錯、提升調試效率,讓“跑起來”不再依賴隱性經驗,而是可以被復現、被驗證、被持續迭代的工程流程。

▲知識庫首頁圖
與此同時,蘿博派對長期建設并持續維護“動手學人形機器人問題清單”共創知識庫,覆蓋行業發展、硬件研發、軟件研發與生產制造等關鍵環節,旨在將行業討論從“表演型炫技”拉回“實用落地”。該知識庫主張人形機器人優先解決行走穩定性、抗摔性等基礎能力,并圍繞尺寸、重量、散熱、成本等量產關鍵問題展開共建,以“全員編輯、按緊急度排序”的開放機制,將單一團隊的經驗沉淀升級為“全行業共建的落地指南”,推動行業從“各自試錯”走向“協同突破”。
核心突破:性能與步態雙達標

▲機器人跑步實拍
蘿博頭原型機的關鍵優勢,在于“硬件性能”與“控制體驗”的同步提升。
在運動能力上,原型機跑步速度達到 3m/s 級別,躋身全球全開源人形機器人第一梯隊,回應了行業長期存在的“開源性能滯后于閉源”的刻板印象。為支撐高速與穩定運行,硬件端采用類車規級本體結構與高剛性金屬材料,提升力傳遞效率與整體結構穩定性;同時通過模塊化關節模組實現更高的扭矩密度與更快的動態響應,為跑步與復雜動作提供可靠的執行基礎。
在控制體驗上,蘿博頭原型機搭載擬人步態的 AMP 運控算法,作為其核心控制能力底座。該算法基于數據驅動范式,并深度適配 Behavior Foundation Model(BFM)預訓練框架,通過學習人體動捕數據,使機器人的行走與跑步更貼近人類生物力學特征,在提升動作自然度的同時兼顧穩定性表現,能夠在復雜路況中保持更可靠的姿態控制。同時,這一范式顯著降低新步態與新任務的微調成本,使步態擴展從“重研發”轉向“可遷移、可復用”的工程流程。
對開發者而言,這意味著在不額外承擔高昂研發投入的前提下,即可獲得兼具高性能與自然步態的人形機器人參考方案,并在此基礎上更高效地進行二次開發與場景適配,加速具身能力向真實應用落地。
生態共建:以開源推動協同創新
▲GitHub主頁截圖
此次開源是蘿博派對推進人形機器人行業協同生態建設的關鍵一步。在開發者生態層面,團隊已搭建面向行業的技術交流與共創網絡,吸引上市公司技術負責人、高校科研人員及創業公司核心成員等專業群體加入,形成更高效率的技術交流與資源共享平臺,持續推動經驗沉淀與問題協作解決。
在商業與產業層面,該項目已獲得經緯創投、小米戰投、光源資本等機構的千萬美元種子輪融資。蘿博派對認為,這不僅是對團隊技術路線與工程能力的認可,更是對“具身智能 Infra 化”路徑的驗證:通過開源與標準化,把開發所需的關鍵鏈路沉淀為可復用的基礎設施,讓行業將更多精力投入到真實場景與能力創新之中。
“我們的目標是讓具身智能的開發成本降低 80%。”蘿博派對團隊表示,當硬件不再成為門檻、算法不再是黑盒,具身智能才能真正進入“千行百業”的應用階段,形成規模化的產業價值。

▲原型機和LOGO合影
除開源共創外,蘿博派對也為產業伙伴提供 JDM(聯合定義制造)設計與聯合開發,加速從參考樣機到工程化交付的全流程,覆蓋結構/電氣/控制集成、BOM 與供應鏈、試產與測試矩陣等關鍵工作。
目前,全球開發者可通過官方渠道獲取核心資源與參與共創:
蘿博頭原型機開源倉庫已在 GitHub 上線,作為從硬件到軟件的匯總入口,保持持續更新。
同時,團隊長期維護“動手學人形機器人問題清單”Know-how 文檔,鼓勵開發者通過社區參與編輯、提交行業痛點與復現經驗,共同建設可持續迭代的落地知識庫。
蘿博派對將持續基于社區反饋優化技術方案,推動行業從“各自為戰”走向“協同共贏”,并歡迎全球開發者加入共創,探索人形機器人技術在真實場景中的實用化落地路徑。
轉自:鳳凰網
【版權及免責聲明】凡本網所屬版權作品,轉載時須獲得授權并注明來源“中國產業經濟信息網”,違者本網將保留追究其相關法律責任的權力。凡轉載文章及企業宣傳資訊,僅代表作者個人觀點,不代表本網觀點和立場。版權事宜請聯系:010-65363056。
延伸閱讀



