在Web3加速重塑未來互聯網基礎架構的今天,車輛邊緣網絡作為智能交通與自動駕駛的重要技術支柱,正迎來前所未有的發展機遇。為了應對日益增長的計算需求、復雜的異構網絡環境以及對低延遲高可靠性的迫切要求, 微云全息(NASDAQ:HOLO)發布了一項突破性技術——基于博弈論并結合卷積神經網絡(CNN)劃分的車輛邊緣網絡動態卸載策略(GPOV)。這一策略的推出,標志著車輛邊緣智能處理邁入了一個全新的動態協作時代,為構建高效、安全、去中心化的未來出行生態打下堅實基礎。
隨著Web3概念的快速普及,基于區塊鏈的去中心化網絡逐漸成為新一代信息基礎設施的重要組成部分。Web3賦予用戶數據主權,強化了網絡設備之間的協作與信任。在這種背景下,車輛邊緣網絡的作用也發生了深刻變化。傳統的中心化云處理模式由于帶寬瓶頸、隱私泄露和延遲高等問題,已無法滿足自動駕駛、道路物體檢測等關鍵應用場景的需求。車輛邊緣網絡以其近源計算、快速響應、數據隱私保護等優勢,成為智能交通體系中不可或缺的關鍵環節。
然而,隨著人工智能,特別是深度學習應用的爆發式增長,邊緣網絡面臨著前所未有的挑戰。深度學習模型規模日益龐大,參數數量呈指數級上升,其計算和存儲需求遠超傳統任務。盡管將深度學習任務遷移至邊緣服務器能夠顯著降低延遲,但過高的任務并發性也極易導致邊緣節點資源緊張、任務堆積、系統響應變慢甚至崩潰。這一矛盾成為制約智能車輛系統廣泛應用的重要瓶頸。
針對這一關鍵問題,微云全息通過深入研究 Web3環境下的邊緣計算特點,結合博弈論與卷積神經網絡劃分技術,提出了創新性的GPOV策略。這一策略不僅充分考慮了車輛邊緣網絡中的資源異構性、任務動態性和網絡拓撲變化,還有效協調了多車輛節點之間的計算卸載與協作關系,實現了資源的最優分配與延遲的顯著降低。
GPOV策略的技術核心在于兩個方面的深度融合:一是CNN模型劃分的高效資源利用與并行處理,二是基于博弈論的動態最優卸載決策機制。CNN模型由于其層次分明、特征提取清晰的結構特點,非常適合被劃分為不同粒度的子任務。通過對CNN網絡進行合理劃分,可以根據車輛節點與邊緣服務器的當前狀態,將不同復雜度的子任務靈活分配到計算資源較為空閑的節點上,實現并行推理與快速響應。這種劃分不僅大幅降低了單個節點的負載壓力,還提升了整個邊緣網絡的吞吐能力和穩定性。
在任務劃分完成后,GPOV引入了博弈論作為卸載決策的智能引擎。每一臺車輛或邊緣節點被建模為博弈體,它們以延遲最小化、資源利用最大化為目標,在動態環境中自主決策是否執行本地計算或將部分任務卸載至其他節點或邊緣服務器。通過構建納什均衡導向的多方博弈模型,系統能夠在全局范圍內實現最優的任務分配與計算卸載,大幅度提高資源利用效率,并有效規避因單點過載導致的系統瓶頸。
為保證卸載決策的實時性與準確性,GPOV策略采用了多種環境感知機制。系統通過持續監測節點的可用計算能力、網絡帶寬、能耗水平以及任務負載情況,動態更新博弈參數,從而適應快速變化的路況和網絡環境。不同于傳統靜態策略,GPOV可以根據環境變化自適應調整劃分粒度與卸載路徑,做到真正意義上的動態優化。
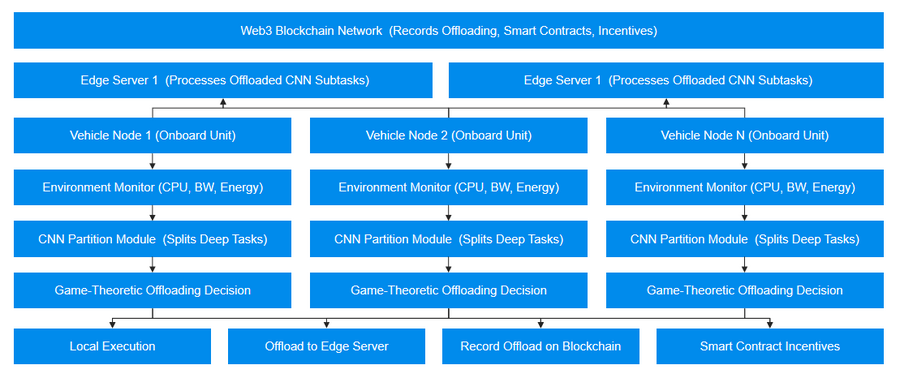
在實際部署中,GPOV策略引入Web3去中心化特點,利用區塊鏈技術進行任務卸載記錄和資源交易的透明化處理。每一筆卸載決策與資源交換行為都被記錄在鏈上,保障了交易的可追溯性和不可篡改性,防止節點作弊和資源濫用。與此同時,系統通過智能合約自動激勵高效貢獻節點,構建良性循環的協作生態,進一步提升了網絡的整體性能與安全性。
在驗證GPOV策略的性能優勢中,微云全息(NASDAQ:HOLO)進行了大量仿真實驗與實際道路測試。測試環境涵蓋城市快速路、高速公路、城區復雜路況等多種典型場景,實驗車輛數量從數十輛到數百輛不等。結果顯示,相比傳統的本地推理、集中卸載、以及簡單規則基卸載策略,GPOV 策略在絕大多數場景下均表現出更優異的性能。具體而言,平均推理延遲降低了35%以上,系統吞吐量提升了28%,節點能耗下降了18%,系統穩定性提高了46%。尤其在高并發、高動態變化的環境下,GPOV策略的優勢更加顯著,充分展現了其強大的實用價值和廣闊的應用前景。
此外,GPOV策略的適用范圍并不僅限于車輛邊緣網絡。在智慧城市、工業互聯網、智能制造等需要邊緣智能與協作計算的領域,該技術同樣具有廣泛的推廣價值。未來,隨著Web3基礎設施的進一步完善和普及,微云全息計劃將GPOV策略擴展應用至多種邊緣智能場景,推動去中心化智能計算生態的蓬勃發展。
微云全息技術研發團隊表示,GPOV策略的提出是一次理論創新與工程實踐的深度結合。在算法設計上,團隊基于深厚的博弈論建模與深度學習劃分優化理論,針對邊緣計算環境的不確定性和資源約束性,開發了多種高效求解算法與動態調優機制。在系統工程上,構建了完整的邊緣卸載仿真平臺,涵蓋了真實的車輛運動模型、通信鏈路模型與異構計算節點模型,確保了算法設計與實際部署之間的高度一致性與可行性。
GPOV策略還將進一步演進。微云全息(NASDAQ:HOLO)團隊正在探索將聯邦學習與隱私保護機制引入卸載決策過程,使節點在協作時既能共享必要的信息,又能保護自身敏感數據不被泄露。同時,隨著量子計算、神經網絡加速器等新型硬件技術的興起,GPOV將繼續適配新一代計算平臺,進一步釋放邊緣智能的潛力。
在一個交通越來越智能化、網絡越來越去中心化的時代,微云全息堅信,只有不斷突破核心技術,才能真正構建安全、高效、可靠的未來出行系統。GPOV策略的推出,正是微云全息秉持技術創新理念、堅持面向未來布局的重要體現。隨著這項技術的應用,相信未來的車輛網絡系統能夠變得更加聰明、更具韌性,為構建一個更加安全、智能、綠色的交通未來貢獻力量。
轉自:新浪財經
【版權及免責聲明】凡本網所屬版權作品,轉載時須獲得授權并注明來源“中國產業經濟信息網”,違者本網將保留追究其相關法律責任的權力。凡轉載文章及企業宣傳資訊,僅代表作者個人觀點,不代表本網觀點和立場。版權事宜請聯系:010-65363056。
延伸閱讀



